民間宇宙開発チーム、月面探査プロジェクトのHAKUTO(ハクト)の主催でした。先週、日本橋三越にて月面走行ロボットを試運転させていただき、今日の講演を知りました。
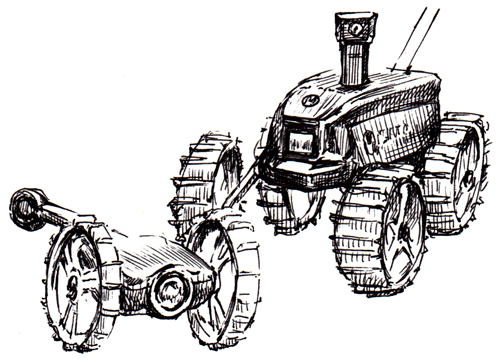
左が2輪ローバーの「Tetris(テトリス)」、右が4輪ローバーの「MoonRaker(ムーンレイカー)」です。2機を組み合わせて、レースに挑むそうです。車輪は宇宙に適した特殊な樹脂製で、3Dプリンターにて作られていました。
月面ロボットレース「Google Lunar XPRIZE」に日本から唯一参加しているそうです。レース内容はハクトのパンフレットによると以下の通り。「ミッションは月面に純民間開発のロボット探査機を着陸させ、着陸地点から500メートル以上移動し、指定された高解像度の動画や静止画データを地球に送信すること。世界10か国以上から18チームが参加しています。」
そして、ハクトはJAXAが発見した「月の縦孔」の調査を最終目標にしているそうです。「月の縦孔」には穴の直径よりも、大きな空洞が広がっていることが確認されており、将来的には月面基地にも適するのではないかと考えられているそうです。
月は子どもの頃に読んだ科学マンガや、アポロ計画のドキュメントドラマを観たくらいで、本当に遠い存在でした。SFの世界と思っていたけれど、確実に未来は近付いているのですね。
→ハクト(月面探査に挑戦する、日本発の民間宇宙開発チーム)



 2015/01/17
2015/01/17 2015/01/19
2015/01/19






 イースターのハンプティ・ダンプティ最近、イースター(復活祭)のお菓子を、よく見かけるようになり...
イースターのハンプティ・ダンプティ最近、イースター(復活祭)のお菓子を、よく見かけるようになり... 缶バッチをリメイクDIY割とよくもらうグッズ、缶バッチ。自分もイラスト入りで作成した...
缶バッチをリメイクDIY割とよくもらうグッズ、缶バッチ。自分もイラスト入りで作成した... 地球儀本日4/22は地球について考える「アースデー」。と、いうわけ...
地球儀本日4/22は地球について考える「アースデー」。と、いうわけ... 棒人間棒人間を立体的に描いてみました。 シンプルな図形、ピクトグラ...
棒人間棒人間を立体的に描いてみました。 シンプルな図形、ピクトグラ... 色塗りの練習わざとはみ出して塗ってみました。うーん。もっと、ラフに仕上げ...
色塗りの練習わざとはみ出して塗ってみました。うーん。もっと、ラフに仕上げ...